未来车之眼?五个问题带你了解激光雷达
[汽车之家 技术] 无论接受与否,未来可能注定将由AI取代你成为汽车“方向盘”后方掌控全局的“人”。TA们看得更远、懂得更多、反应更快,能自动避免拥堵,还能够提前感知危险避免事故——最重要的,是这些机器人永远不会酒后驾车,这就是自动驾驶时代为我们描绘的美好蓝图。今天我们要聊的,是自动驾驶时代车辆上一个必不可少的重要组件——激光雷达。为什么说激光雷达是自动驾驶时代的必需品?它同普通雷达相比有何优势?我们采访了多位业内专家和企业,并通过下面五个问题来给大家科普一下。
这篇文章我们要聊到:
1、激光雷达的基本原理
2、激光雷达看到的是什么?
3、车载激光雷达有何不同之处?
4、现在车上已经有了各种各样的雷达,为什么还需要激光雷达?
5、激光雷达还分固态和——“液态”?
Q1:为啥激光能做雷达?
Emmm…故事似乎要从一个多世纪前说起,在1916年,“天外来客”爱因斯坦首先描述了原子的受激辐射与自发辐射的关系,虽然我听不懂,但是这个发现为后来制造激光奠定了基础。在1960年,位于美国加州的休斯实验室制造出了人类史上第一束激光。
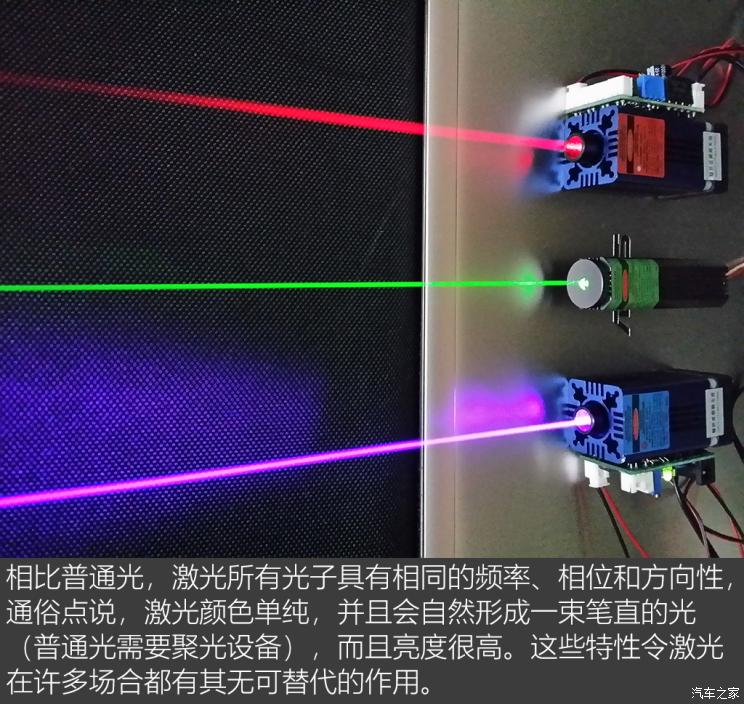
激光的应用领域非常广泛,从医学手术、激光打印到未来星球大战的激光武器不一而足,而其中一个重要的分支,就是用来测量距离。由于激光光束笔直(准确度高),且光子特性一致(抗干扰性好),所以是测量距离的理想介质。当发射源向目标物体发射光束,光束反射之后被传感器接收,依据这期间的时间差,就可以计算出同目标物体之间的距离,这就是飞行时间测距法(Time of Flight,简称ToF)。
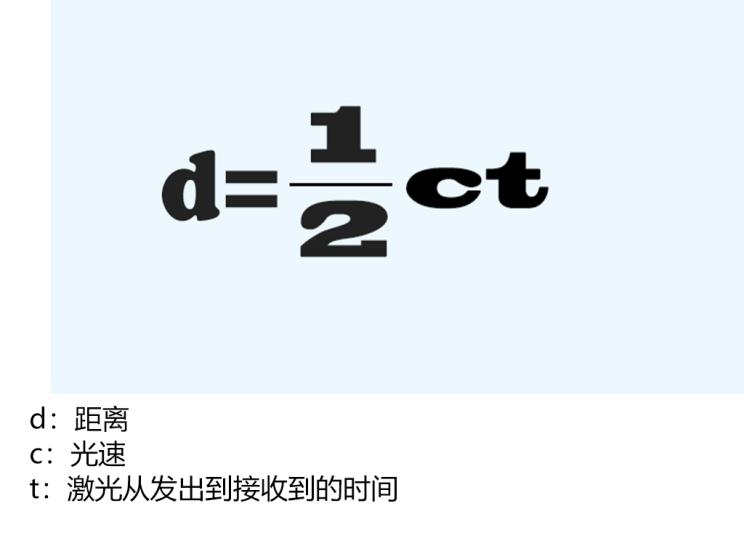
这便是激光雷达的基本原理,简单来说,一个激光发射器和一个接收传感器,就组成了激光雷达的基本结构。同世界上众多尖端科技一样,激光雷达最初也是应用于军事领域。在1961年,休斯飞机公司推出了世界上第一个类似于激光雷达的系统,用于追踪卫星。随着技术发展成熟,激光雷达如今被应用于各种领域的测量勘探工作,从研究大气成分、地质结构到全新的iPad Pro,以及我们将要重点讲述的自动驾驶。

Q2:装在汽车上的激光雷达有啥不一样?
虽然前路漫漫,但是如今业界都对自动驾驶时代充满了憧憬。对于自动驾驶的主体——汽车来说,如何像驾驶员一样,或者比驾驶员对周围的环境有更准确全面的认知,是实现自动驾驶的前提条件。而激光雷达精准测量的优势,在目前来说是实现自动驾驶的不二选择。根据激光测距的原理,一束激光理论上可以测量到一个点的距离,但是自动驾驶车辆需要对周围环境进行全方位的感知,如果让这束激光旋转起来,就可以实现对周围环境的360°测量,而一束激光旋转之后,得到的是雷达与周围一条线之间的距离。
【激光雷达基本工作原理】
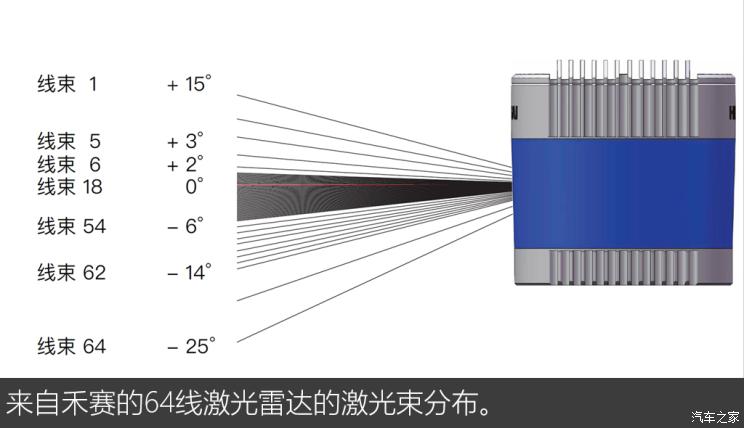
汽车如果需要对周围的环境有更加全面立体的感知,仅仅得到一条“线”的数据显然是不够的。在此基础上,在雷达中集成更多的激光器,从不同角度发射测量光线,就能够实现对周围物体更加全面而细腻的扫描,能够让车辆对周围事物形成一个精准的三维感知。对于机械旋转式激光雷达而言,有多少个激光发射器,就代表了这是多少“线”的激光雷达,激光雷达的线数越多,对周围环境的测量就越全面,当然成本也是随之飙升。下面我们以国内激光雷达的代表企业禾赛科技的产品为例,做一个更加直观的解析。
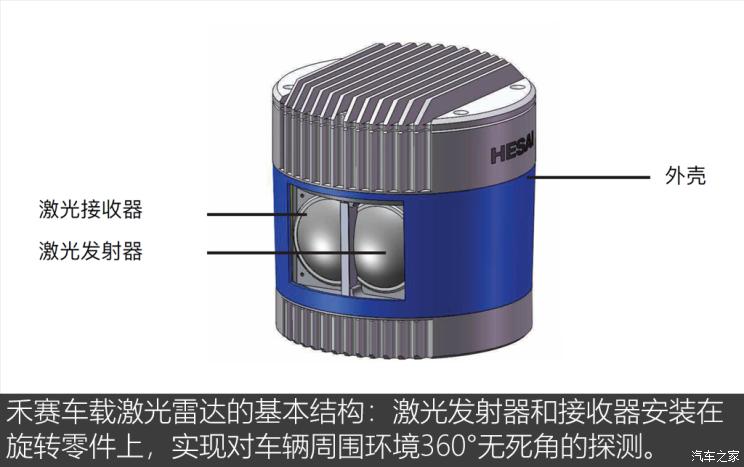

【车载激光雷达实现了对周围环境全面立体的精准探测】
相比在其他领域使用的激光雷达,自动驾驶对于所使用的车载激光雷达无疑有着更为苛刻的要求:作为无人车的“眼睛”,性命攸关的它不容许有丝毫的差错,因此车载激光雷达必须达到车规级标准。


车载激光雷达有如此多的苛刻要求,所以是一项技术壁垒非常高的高科技产业。虽然目前市场规模并不算大,但是对于未来而言,激光雷达技术是通往自动驾驶的必经之路。所以无论主机厂还是各大零部件供应商对其都是趋之若鹜。















