前景光明 体验威马HAVP自动泊车系统
[汽车之家 辅助驾驶系统体验] 在2020年的百度世界大会上,百度公布了一段与威马汽车合作开发的AVP自动泊车演示视频,当时我的同事对其进行了抢先体验。今天我们又来到了威马汽车的“老家”湖北星晖新能源智能汽车生产基地,趁着威马这款全新纯电动SUV量产下线,再一起看看“自动泊车”究竟好不好用。

威马这款全新中型纯电动SUV即此前威马EVOLVE(参数|询价)概念车的量产版本车型,该车被命名为“W6”(下文称其为威马W6)。至于AVP自动泊车,其全称为“云端智能无人泊车系统”(Cloud AVP),这套百度与威马汽车合作开发的自动泊车系统分为两种落地场景:一个是类似商场或者写字楼的那种商业停车场;另一个是自己家或者公司那种可能拥有固定车位的停车场;前者被称为PAVP,后者被称为HAVP。

在2020年,我的同事在地下停车场体验了PAVP部分的内容,感兴趣的朋友可以移步阅读:《2021就能量产?体验威马AVP自动泊车》。而今天我们在地上停车场体验了HAVP的内容,也就是您在家中或公司停车场会用到的部分,相信HAVP的应用频率也会更高一些。同时据官方透露,HAVP在新车量产交付时配备,而PAVP功能将在后期通过OTA实现。额外提示,官方称我们此次体验到的HAVP自动泊车系统可能与最终对用户交付的版本有不同,目前技术人员还在对这套系统不断进行优化。
首先关于硬件部分,威马W6全车共配备了7个摄像头、5个毫米波雷达以及12个超声波雷达,这些传感器都会被用于AVP,各种传感器相互配合、相互作为冗余,以在更大程度确保自动泊车的安全。

开门见山,我们直接聊聊这套HAVP的操作流程、体验如何,以及这套自动泊车系统还有什么需要优化的问题。
更多精彩视频,尽在汽车之家视频频道
『威马汽车HAVP自动泊车演示视频』
●HAVP如何实现自动泊车
○HAVP的学习路线过程
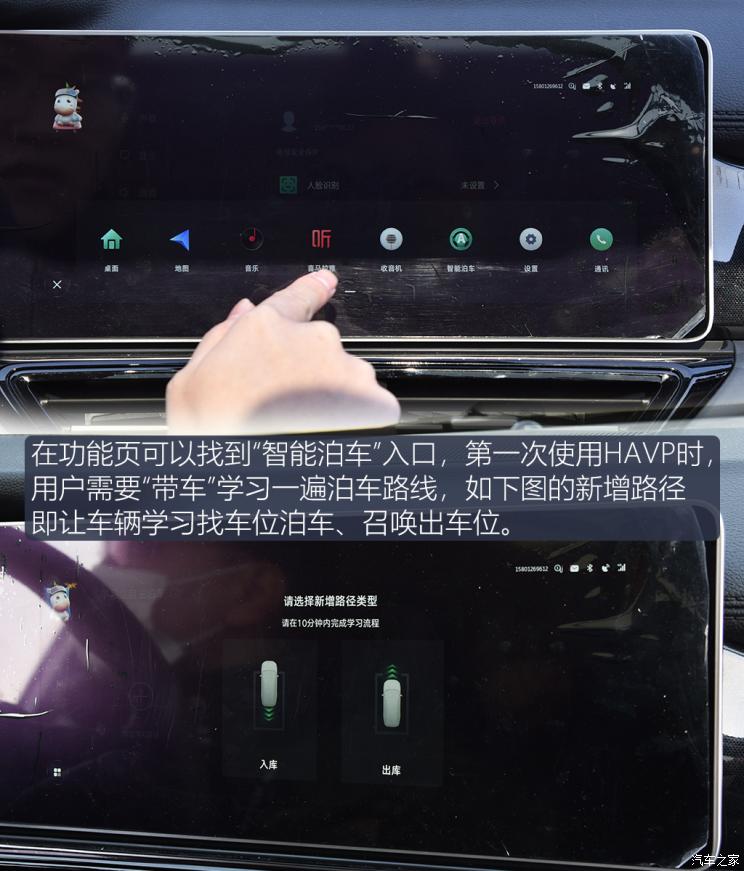
HAVP可实现被召唤出车位(出库)、自主找车位停车(入库)两个动作;但在首次使用HAVP时,车辆需要一个学习过程,即用户需要手动驾车从车位驶出到上客点(出库)、从下客点到车位(入库)。所谓学习过程,你可以理解为“人带车学习一遍路线”,也就是车辆记录、上传用户的行驶路线;当车辆真正进行自动泊车时,车辆会复刻用户此前的行驶路线,从而完成自动泊车的入库、出库动作。


刚才我们说过,车辆在进行自动泊车时会复刻用户此前的“学习路线”。我们在封闭路段特意尝试了一下,即便用户在带领车辆学习时有跨黄线、在马路上“画龙”等不正常的驾驶行为,车辆也会完全复刻这些行驶路线、行为。所以用户需要注意,在车辆“学习路线”时您要保证合规驾驶,以免车辆在自动泊车过程中发生不必要的危险。

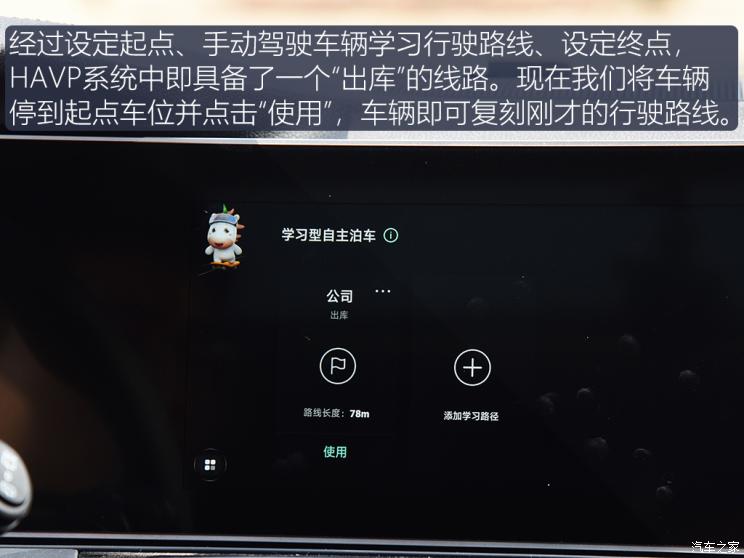
出库和入库两个学习过程相同,我们就不再展示入库的学习过程了。考虑到用户的多个可用车位场景,目前HAVP自动泊车系统最多支持储存5条线路,相信已经能满足大部分用户的需求了。线路学习过程没什么问题,因为这基本是靠用户手动完成的,车辆端的完成率、效率都表现不错。但在真正的车辆自动泊车过程,有一些问题暴露了出来。
○HAVP的自动泊车过程
在车辆自动泊车时,第一个不太符合驾驶员实际驾驶的情况就是车辆行驶速度稍慢。当然,在目前这些具备“自动召唤”、“自动泊车”功能的车型中,绝大部分车型的行驶速度都比较慢,毕竟要保证安全第一,而且很多停车场的限速也都在10km/h甚至5km/h以下,所以车辆行驶速度慢似乎也无可厚非。
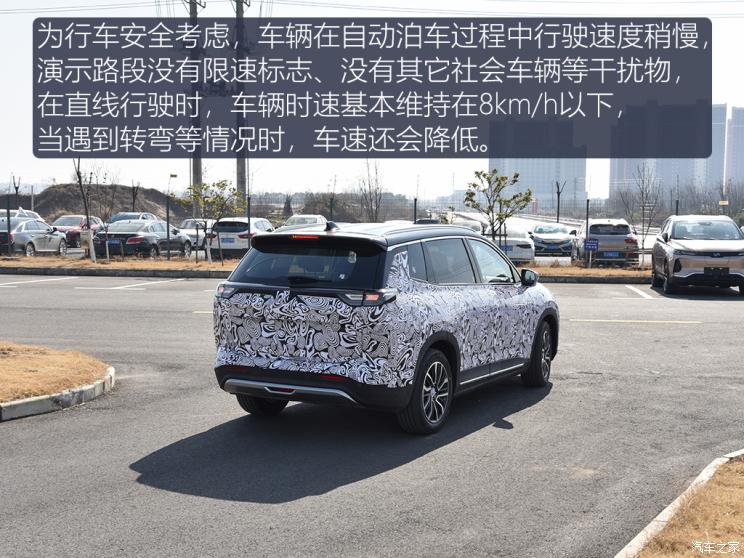

在车辆转弯时,车速甚至会低至5km/h以下。我们的演示路线会经历一小段逆光路段,同时路面有路灯杆的影子,车辆每次经过这段路时的车速都会在2-3km/h左右,也就是一个成年人走路的速度都能比车辆的行驶速度快。经过向官方技术人员询问,官方称这可能是逆光、影子对车辆视觉系统造成了影响,毕竟要保证安全第一,所以车辆会将车速降的比较低。但在真实应用场景中,如果后方有其它社会车辆的话,场面可想而知......
最后让人比较欣慰的一点是,车辆泊入车位时的完成率很高,基本每次都能比较正的停进目标车位,而且即便驾驶员在手动演示时车辆没有停正,车辆自动泊车时也能将车停正。

当然,驾驶员在车里进行自动泊车操作显然不符合实际用户应用场景,在威马汽车的手机互联App中,用户可进行远程操作,真正使车辆实现“召唤”、“自动泊车”。在用手机App进行远程操作时,如果用户发现车辆周边有异常情况,松开手机屏幕,车辆即可停止行驶;如果车辆在自动行驶时检测到周围有障碍物,车辆也会主动刹车,当障碍物消失后车辆继续前进,目前车辆不具备自动绕过障碍物的能力。

App端的远程操作也有值得优化的部分,比如车辆不在用户的视线范围内,或有其它障碍物挡住了用户视线,此时我们是无法判断车辆周边情况的,这也就不存在及时发现危险、处理危险了。车辆在进行自动泊车时,中控屏会实时显示全景影像界面,如果App端也能加入车辆全景影像画面,想必用户监管车辆就会更得心应手了。
○HAVP的优点和不足汇总
体验完HAVP,我们先来汇总一下这套系统表现不错的方面。第一点就是学习过程简单、学习效率高;用户在出库时开一遍车,入库时开一遍车,车辆即可完成学习,这个过程不难理解,您可以轻松上手,同时这个过程耗时并不长,毕竟行驶路线的距离有限、车辆记录/上传线路的速度也比较快。
第二个表现不错的方面就是车辆行驶过程中安全冗余做得比较到位;这里提到的安全冗余主要指车速的控制以及车辆面对障碍物时主动刹车的能力,至少在我体验的多次自动泊车中,车辆并未出现“吓人”的“蜜汁操作”。
第三个表现不错的方面就是车辆泊车入位能力较强;无论目标车位两侧是否有其它社会车辆,HAVP在停车时基本都能一次停到位,这确实要比一些驾驶员的停车能力强。不过目前HAVP还只支持垂直车位,斜向车位、侧方停车并不支持。

至于值得优化的部分,第一点还是车速;确实车速慢会更安全,但如果您体验了只有7km/h甚至低至2-3km/h时速的车辆行驶过程,我不确定您还愿不愿意再用它一次,也不确定您能不能接受来自后车的“滴滴滴滴”。
第二点值得优化的部分是目前车辆行驶路线基本是复刻驾驶员的“教学路线”,不知道后期车辆能否凭借自己的判断选择一条更优、能绕过一些临时障碍物的路线。
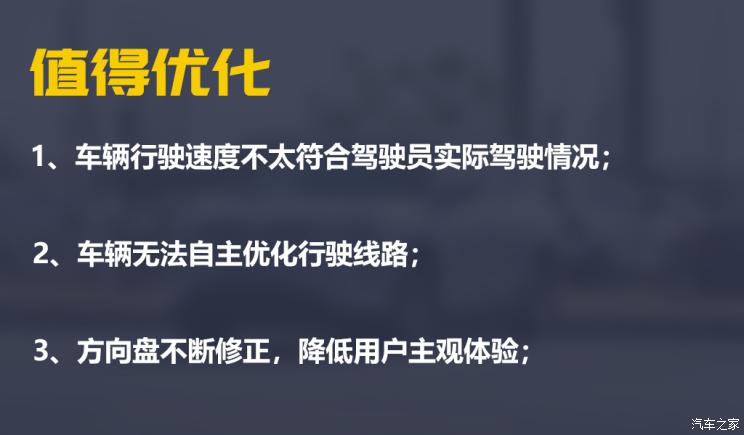
第三个值得优化的点是车辆直行时方向盘不断修正方向的行为,虽然从目前来看,这个方向盘不断摆动的行为不会影响整体泊车过程,但如果用户坐在车上的话,体验确实不佳。
○未来PAVP的覆盖率会如何?
HAVP只需要学习用户的行驶路线即可,但PAVP与之不同。在商场或写字楼等地下车库中,PAVP要基于车库的高精地图来实现自动寻找车位、自动上下楼层。这也就意味着,只要你肯付出一定的时间成本,HAVP就能在符合条件的停车场实现自动泊车;但PAVP要求车辆已拥有目标车库的高精地图,否则无法实现自动泊车。


对于绘制高精地图,威马汽车只是表示他们和百度会尽快完成各地库的覆盖,同时在用户的日常行车中,威马汽车也会收集相关数据,对高精地图进行优化。就算有一些车库自身具备高精地图,那只以北上广等大城市为例,每个城市有多少大商场、大写字楼的地下车库?那再算上其它城市的车库呢?至少以我目前的理解来看,绘制高精地图的工作量应该是非常庞大的,这也就意味着您什么时候能在所在城市各大商场地库用上PAVP功能好像还不确定。
总结:
目前威马汽车的HAVP系统有优点也有不足,这当然是正常情况,只是我们希望这套系统真正交付到用户手中时能有更好地表现。另外,这套自动泊车系统也给我们留下了很多想象空间,比如配合无线充电技术,车辆是不是可以实现自己找到车位,自行充电?结合未来不断提升的辅助驾驶技术,我们是不是也解决了“最后100m”的辅助驾驶问题?我们似乎真的不需要自己驾车了?总之,威马汽车这套AVP云端智能无人泊车系统似乎还有很多玩法,我们也期待威马W6真正交付到用户手中时会有什么表现。(文/图/摄 汽车之家 尤冬青)
















