特斯拉智能召唤是什么鬼?需要注意什么
曾经一则关于特斯拉的新闻上了头条,内容是在美国华盛顿附近的一个球场正在举行一场活动,而赞助商是一家飞机制造商,当时有飞机正停在那里。而一位特斯拉车主使用了智能召唤,结果召唤来的特斯拉MODEL X居然撞上了价值350万美元的飞机,还推着飞机走了几米。

先心疼这位车主几秒钟,我们还是来聊聊这次事件的起因,也就是特斯拉的智能召唤功能,其实这个功能诞生已经有好几年了,最初是出现在特斯拉Model 3(参数丨图片)身上的,2020年中旬才开始大规模应用在量产车型上,实际应用到现在还不到两年时间。马斯克还称其为特斯拉最具病毒性的功能。

其实特斯拉所搭载的智能召唤功能目前限制还很多,比如手机与车辆的距离不能超过65米(也有说是60.96米,即两百英尺),单词召唤的最大位移距离为145米,而且官方宣称这一功能的场地是有要求的,仅限于“私家停车区域和行车道”。
所以说,其实目前智能召唤的限制还是非常多的。在查阅了诸多资料之后,我也是了解到了智能召唤的实际应用原理,其核心是高清地图、传感器信息处理、车辆控制三个部分。

首先是高精度地图,比如谷歌地图,海外常用谷歌地图其清晰度和定位精度是非常高的,在这里举个例子,谷歌地图对于地图放大倍率最高可以达到18级,而百度地图的最高放大倍率为17级,高德地图只有15级。在定位精度上,百度和高德距离谷歌也有一定的差距。
更清晰的谷歌地图,对于智能召唤这样的高精度短距离导航来说,是非常重要的,一米的误差就能让车一个在车道上,一个在人行道上。
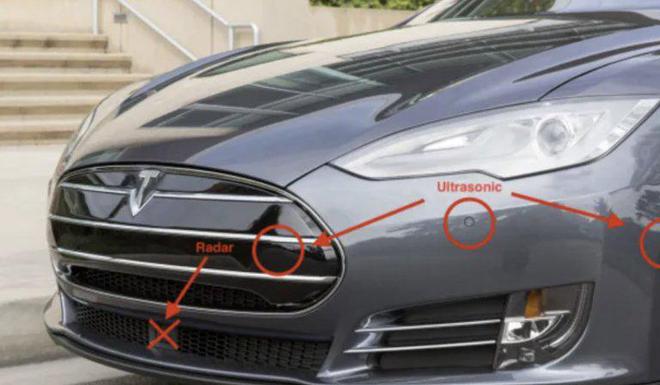
然后就是传感器信息处理,像特斯拉的传感器就是以摄像头为主,在捕捉到可能的障碍物时,会分析和确认这一障碍物的体积,同时结合高精度地图,重新规划路线。比如在确认了摄像头分析确认了路的宽度和障碍物的宽度,确认足够可以过去时,就会让车辆控制部分进行转向,避开障碍物。而当确认不足以通过时,就可能以停下等待或者是绕路的方式完成动作。
听起来很容易?要知道如果是一个人在控制这台车,那确实是很容易,但是这是电脑在控制,无数的传感器在不断地汇聚信息,监控每一个可能出现的仅仅情况,高精度地图随时定位和规划路线,车辆控制系统保证车辆行进在计划路线上。这就要求定位精度够高,地图规划快而准确,传感器随时注意感知区域内的所有情况,而最重要的就是中央处理器能够将所有的数据处理到位。

目前特斯拉在软硬件层面上都在持续进化,早期采用了人来进行代码编写,如今采用二神经网络训练的形式,由优化编写代码。同时特斯拉计划推出Autopilot HW3.0,就是为运行深度神经网络而定制的新型处理器。官方信息是预计HW3.0的计算能力大约是HW2.0的10倍。作为参考,HW2.0每秒大约可以执行10万亿次深度神经网络(DNN)运算。
就目前来看,智能召唤在国内还不太行得通,原因很简单,首先是地图精度确实还很难支撑这一功能的大规模应用,还有就是目前在城市里,尤其是一线城市,高楼大厦林立,单独的平面地图是支撑不起立体车库的复杂环境的。

其实啊,这款智能召唤功能还是一个非常初始的功能,用很多车评人的话来说,就是在一个L2.5级别的车上安上了一个L4级别的功能,因此未来它的发展潜力也是非常巨大的。此前我们就聊过关于AVP自动辅助泊车的内容,未来上这一功能将会是AVP的一部分,而不是单独的存在。
最后再给大家补充两个关于智能召唤的关键点
首先是这一功能目前还处在测试阶段,因此驾驶员在召唤功能使用时,请确保目视可及的范围内是安全的,并且随时终止这一召唤操作,如果发生意外将由召唤人承担全部责任。
其次在国内如果你希望你的车辆拥有这一功能,需要开通完全自动驾驶能力拓展包,也就是64000元的那个特殊功能包。基础版本和32000的版本都没有这个功能















