激光雷达即将迎来大爆发,你看得懂它么?科普激光雷达指标参数
时间即将进入2021年,随着激光雷达的装车,国内新能源市场,也将迎来无人驾驶的战国时代。
激光雷达的厂商这几年飞速发展,美国玩家Luminar刚刚在纳斯达克上市,老牌厂家Velodyne也虎视眈眈,国内更有华为和大疆携技术优势来势汹汹,更不用说这几年如雨后春笋般冒出来的初创企业。
而作为主机厂的车企,也不甘落后。国外的奔驰、奥迪、宝马、沃尔沃、本田;国内的小鹏、北汽、长安、长城都纷纷表示要在量产车型上搭载激光雷达。

小鹏P7
尤其是新能源纯电汽车,车企们在电池、电机和电控上很难拉开距离,所以自动驾驶注定是一个标榜技术实力的战场,而激光雷达,由于硬指标非常直观,更是无人驾驶中的兵家必争之地。接下来车企们必将挥舞着激光雷达,在无人驾驶的战场上厮杀!
这一幕在智能手机上出现的更早:苹果至今还用着1200万像素的摄像头,而其他Android/ target=_blank class=infotextkey>安卓厂家已经奔着1亿像素狂奔而去。很多用户拿着像素是iphone好几倍的千元机,却从来没有体验过拍照的乐趣。然而这不耽误安卓厂家继续在摄像头参数上面下功夫,因为在芯片来源单一的情况下,摄像头的参数是最直观的。
“剧场效应”很好的解释了这个现象:大家都坐着看电影,第一排的人突然站了起来,结果第二排只能跟着站起来,然后是第三排......直到最后全剧场的人都站起来。
所以,不管激光雷达能不能用,有没有用,除了特斯拉,只要有一个车企用了,其他车企没得选,只能是小猪——配齐!
既然用户没得选,那钱总要花的明白吧?所以能够看懂激光雷达的参数,至少能让我们把钱花个明明白白。好了,接下来咱们就介绍一下激光雷达,尤其是雷达参数。
激光雷达
激光雷达通过发射激光束扫描目标的位置、速度。
扫描的数据为<x,y,z,h,...>,xyz为空间坐标,h是强度,还有一些其他信息。激光雷达扫描的数据,叫点云数据,点云数据可以通过软件可视化。
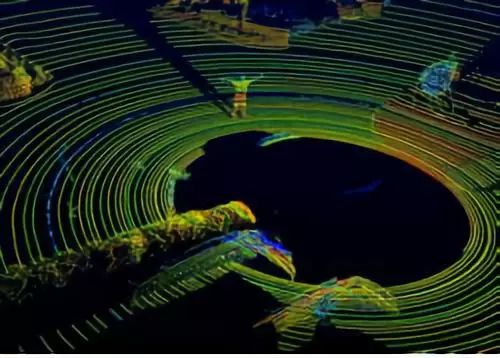
点云数据可视化
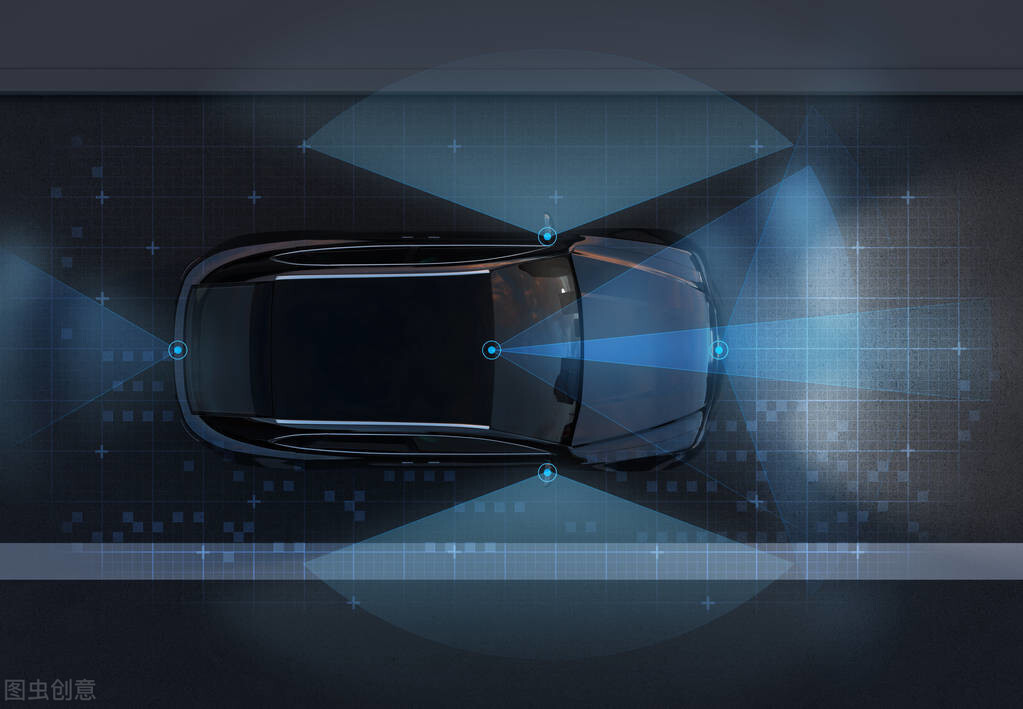
下面是激光雷达和摄像头、毫米波雷达的比较:

激光雷达在自动驾驶中的作用,主要是3D环境感知。如果说摄像头是汽车的眼睛,那激光雷达就是汽车的手,可以通过触觉清醒的感知周围环境。
激光雷达参数
激光雷达参数很多:激光的波长、探测距离、FOV(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、IP防护等级、功率、供电电压、激光发射方式(机械/固态)、使用寿命等。
和用户直观感受很大的包括六大参数: 探测距离、测距精度、线束、FOV(垂直+水平)、角分辨率、出点数。
下图就是华为激光雷达的几个参数:探测距离220米,水平FOV 140°,垂直角分辨率小于0.1°。如果您对激光雷达不了解,看着肯定会晕。
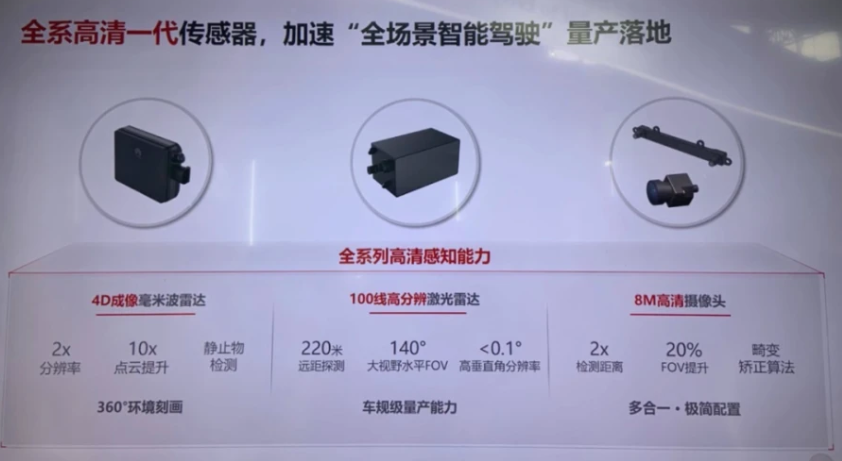
华为激光雷达
不用怕,接下来我们就对和用户直观感受相关的参数逐一说明:
1、探测距离
探测距离很好理解,就是激光雷达能够探测的范围,或者说半径。
激光雷达的测距能力与被测物体的反射率相关。反射率就是射到目标物的激光能够被反射回来的比率。
目标反射率越高,雷达能够检测到的有效回波就越多,所以能测量的距离越远。
所以探测距离一般和反射率一起出现,比如150米@10%,就是指在目标反射率为10%的情况下探测距离为150米。
说探测距离不说反射率就是耍流氓!当然上图中华为的参数没有反射率,估计写胶片的时候该产品还没最终定型。
2、探测精度
探测精度是指探测距离的精确度,一般以厘米计,探测精度越高,3D景深刻画的越准。
3、线束
激光雷达分为单线束和多线束。
单线束激光雷达只有一个激光发射器,随着雷达转动形成一条水平扫描线,所以只能检测前方有没有障碍物。
多线激光雷达在垂直方向有多个激光发射器,随着雷达转动形成多条水平扫描线,这样就能够扫描一个平面。
如下图所示:
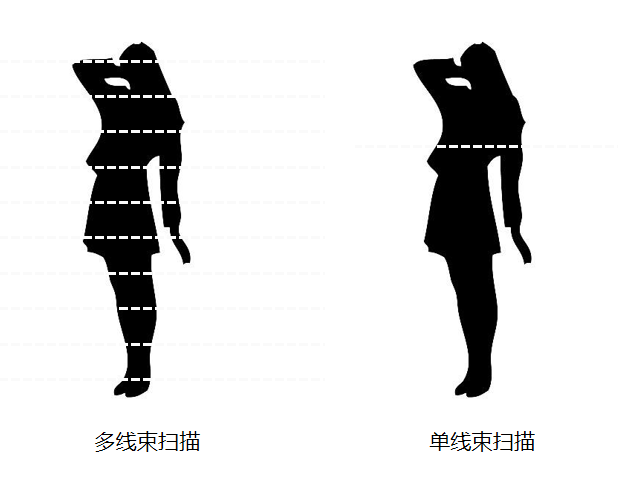
举个例子,单线束就像我们用一个手指头去触摸物体,而多线束就像我们用整个手掌甚至是双手触摸物体。
显然,线束越多,对目标物的刻画越详细,当然价格也就越贵。
4、FOV(水平 垂直)
这是探测视野,包括水平和垂直两个方向,就像是我们打开手电筒照一面墙,光能覆盖的范围一样。
机械式激光雷达能够360°旋转,所以水平FOV是360°。固态激光雷达的水平FOV会小一些,比如华为这款120°已经算是大视角了。水平FOV越大,能够探测的范围越广。
垂直FOV只对多线束激光雷达有用。是指最上面一束激光和最下面一束激光形成的夹角。

垂直FOV的视野一般偏向地下一些,比如水平为0°,那么向上15°,向下25°,这样垂直FOV就是40°,如下图所示。这样的好处是能够让车辆更多的探测到地面车辆和行人。

5、角分辨率
角分辨率和FOV一样,也分为水平和垂直两个方向。
水平分辨率是指左右两个扫描的激光点形成的夹角;由于激光雷达旋转,而激光发射器是脉冲,所以射到目标物上面的是一个一个点。
激光脉冲是固定频率的,所以水平方向的分辨率只和雷达旋转速度有关,只要速度足够慢,分辨率就可以很高,现在做到0.01°也是很正常。但是扫描速度慢也会影响信息采集的速率。所以水平分辨率要和确定的扫描速度对应,扫描速度一般用频率来表示,即1秒扫描来回扫描多少次。
垂直分辨率是指上下两个线束形成的激光点的夹角。线束在垂直方向上不是均匀分布的,而是中间密集,上下稀疏,如下图所示。这也很好理解,因为中间更有可能探测到行人或者是障碍物。

一般厂家宣称的垂直分辨率,显然是最密集那部分的分辨率。比如64线的产品,垂直FOV 40°,如果线束均匀分布,那么垂直分辨率是0.625°。可实际上厂家都是按密集那部分算,宣称垂直分辨率0.2°。华为胶片上面的垂直分辨率0.1,也是指最密集那部分。
6、出点数
也叫周期采集点数,举个例子,一个64线的激光雷达,水平FOV是120°,水平分辨率在10Hz的扫描频率下是0.2°。
我们可以知道,激光一次打出64个点,扫描一次120°能打出64x120/0.2=38400,1秒扫描10次,一共有384000 pts/s。
显然,出点数越多,扫描的效果越好,这就和机枪扫射是一样的道理。
参数解释
好了,掌握了上面这6个核心参数,也就掌握了激光雷达的精髓。
我再举个例子整体解释一下,咱们拿一个学生的学习来做比较:
- 探测距离就是学习的深度,学的越深,掌握的知识越好;
- 探测精度就是学习的好坏,学到越好,将来考试成绩越好;
- 线束就是能同时学习几个学科,语文数学物理化学历史地理啥都行就是线束多;
- FOV视角就是学习的广度,学的越广,知识越丰富;
- 角分辨率就是学习的精细度,学习的越细,考试遗漏的越少;
- 出点数就是学习的结果,点数越多,考试成绩越好。
这样说大家就容易理解了吧,咱们最后再看个实际的例子。
参数应用
了解了激光雷达参数,就能知道厂家到底是赚了我的钱,还是骗了我的心。比如下面这种情况:

看标题感觉广汽动作很迅速,马上就要上激光雷达了,这是要赶在小鹏前面的节奏?
咱们再仔细看广汽雷达的参数,广汽搭载的是一径科技的固态激光雷达 ML-30s。

what?这款雷达是大视角短距离应用,那怎么做无人驾驶?完成侧方停车还差不多!
看,只要了解一点儿激光雷达,就能看透厂家是蹭热度,还是真搞无人驾驶!















